
麻省理工學院 Panasonic 講座教授 Rodney Brooks 在台發表專題演說,介紹 MIT 近期在機械人學 ( Robotics ) 的相關發展。Rodney Brooks 特別提到,MIT 認為機器人是非常值得進行學術研究與產業合作的一個學術領域,至少牽涉到材料、動力、感應器、辨識技術與演算法的整合等等。也提到機器人可以使用的場合手 術、救災、駕駛、製造與老人救護等。
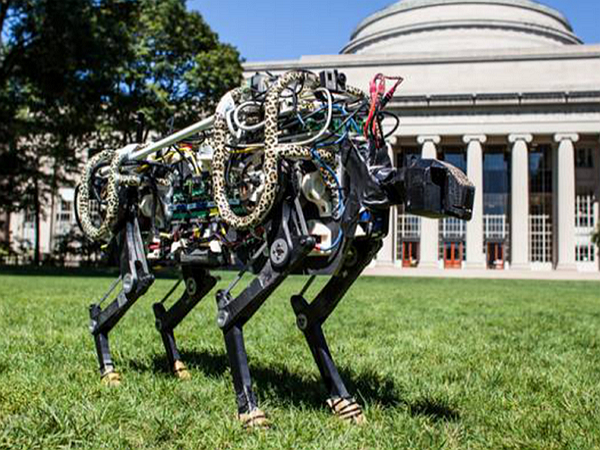
MIT 機械系副教授,同時也是仿生機械實驗室(Biomimetics Robotics Lab)主任的 Sangbae Kim 今日就在時代基金會記麻省理工學院(MIT)全球產研計畫台灣年會介紹他們正在發展中,由美國國防高等研究計畫署 ( Defense Advanced Research Projects Agency, DARPA ) 所補助的機械獵豹 2 代 ( MIT robotic cheetah ) 計畫的最新進展。

(圖片說明:MIT 仿生機械實驗室的 Cheetah 2,數位時代翻攝)
Sangbae Kim 提到會做這隻獵豹的其中一大目的,是希望人類可以透過這個工具在艱難的情況或環境下使用,例如協助在大規模災難時可以救災。他提到在看到東日本大地震所造成的核災後當地的慘況相關的報導影片,他無法想像人要怎麼在那樣的環境中救災與進行大規模復原,特別是在全球主要國家的人力都在衰退的情況。
(影片說明:啟發 Sangbae Kim 的其中一個研究項目,Gecko 啟發機器人計畫的 StickyBot)
Sangbae Kim 提到,在早期他選定要以機器人做為自己的研究項目時,他曾經考慮過很多不同的項目,他想要做出一種可以穩定行動、快速移動的機器人載體(取代輪子在不能夠快速移動的非平地環境自在移動)。經過對生物界的觀察,他發現多數可以穩定快速移動的生物都是四腳著地的(少數使用兩腳著地的包括袋鼠、不能飛的鳥還有....人)。
(影片說明:在 DARPA Robotics Challenge 2015 中的各種雙腳機器人仆街)
因此他決定認真研究怎麼讓機器用四隻以上的腳來移動。所以有了他早前在 Stanford 唸書時的作品 iSprawl。
(影片說明:Sangbae Kim 早期在 Stanford 唸書時的作品 iSprawl,一隻可以六腳移動的機器人)
當然,Sangbae Kim 也考慮過其他移動方式,例如底下的影片,警告:吃飯時慎入。
(影片說明:Sangbae Kim 在實驗室裡實作可以如大自然裡的毛毛蟲班蠕動的機器人)
Sangbae Kim 隨後提到,實作獵豹的基本移動其實並不如想像中難,真正困難的點在後續的一般化,例如可以賦予獵豹視力辨認遠近,並學會在時間內做出正確的跳躍反應,同時需要控制機械腳的平衡避免它亂飛起來。這牽涉到機器視覺識別與視覺穩定技術,在大自然,這是非常簡單可以實現的,例如:
(影片說明:Mercedes Benz 廣告裡演示鳥類頭部自動保持視覺穩定的機制)
Sangbae Kim 最後提到,MIT 獵豹計畫還正在進行,現在剛發表了第二代的獵豹 Cheetah 2。這是第一次可以以時速 15 mile 左右實現移動的四腳機器人,除了可以在保持一定時速的情況下完成自動跳躍平衡,這隻機器人的能耗比率也因為採用全電力提供而非常驚人的靠近於一般人類(相較於採用油做為動力的 Boston Dynamics 的大狗)。
(影片說明:會偵測異物靠近並完成動態跳躍平衡的 MIT Cheetah 2)
- 本文轉載自數位時代

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!