
休士頓機電一體化公司的工程師們想徹底改變水下航行器的現狀,而Aquanaut將成為一個里程碑。傳統的UUV大致分為兩種:可執行遠端探測任務的魚雷式水下航行器;可實現水下操作的無人遠端控制水下航行器,這類航行器通常需要其他船舶輔助監督或控制。HMI創造性地將兩者結合為一體,雖然經常開玩笑說要打造一個變形金剛,但HMI的工程師們對Aquanaut卻十分有信心。

周圍是湛藍的一片,不遠處,兩名太空人正練習太空行走,在這個靜謐的空間裡,只有呼吸聲和耳機裡偶爾來自指揮部的指令才會打破這沉默。
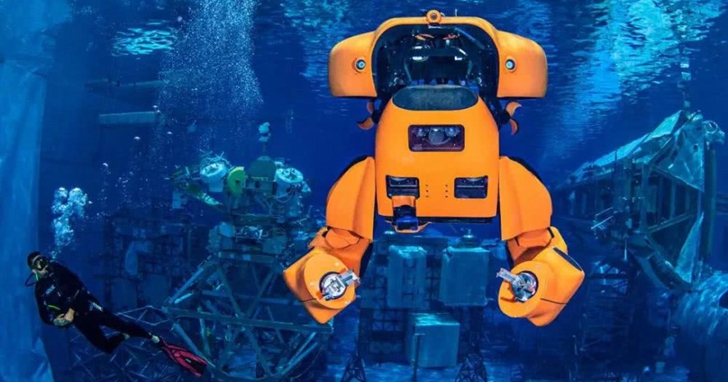
別誤會,這可不是太空,而是在休士頓一個巨大的水池裡,美國太空總署(NASA)用它來訓練太空人適應失重環境。
和太空人一起在水中漂浮的還有一個巨大的橙色的機器人——Aquanaut。
它像一艘微潛艇一樣平穩的穿梭於水中。開始的時候,它和其他無人水下航行器並沒有什麼差別,都靠感應器收集數據,借助推器前進。然後,畫風突變,Aquanaut就像變形金剛一樣,背部隆起,露出兩隻胳膊,很拽地扭動著滿是感應器的腦袋,不一會兒,變身完成,海底變形金剛Aquanaut就正式上線啦!
個中乾坤
Aquanqut相較於其他無人水下航行器中是很特別的。在執行遠距離巡航任務時,它可以是一隻敏捷的魚雷式潛艇,在執行複雜的水下作業時,它又可以變身為一個半人形的機器人。其變身過程如下:
- Aquanaut以流線型潛艇形態駛向工作地點;
- 達到工作地點後,它的背部船體可以升起,露出兩隻手臂和楔形的頭部;
- 攜帶立體攝影機、3D感應器和聲吶系統的頭部旋轉到位;
- 展開兩隻大手臂,上面裝配有壓力感應器和爪形夾鉗。
Aquanaut打造完成已經經過了無數次的設計、修正,為了能夠大幅度地改變形狀,Aquanaut配備了四個定製的線性執行器,可以將身體的上下兩部分分開。額外的特製電機安裝在防水外殼中,用以驅動手臂和頭部。在動力方面,Aquanaut使用的鋰離子電池與電動汽車所用的類似。目前,完整的變形只需要30秒。然而,在真正下海之前,Aquanaut需要在更嚴苛的條件下證明自己的實力,因此,它被送到了NASA的大水池中。
最大深度12公尺,擁有2350萬升水的NASA中性浮力實驗室(NBL),大到幾乎可以容納整個國際太空站。太空人們在NBL中練習太空行走,達到在地球上最接近失重的狀態。從3月下旬的一個早晨起,NBL將泳池的北端劃給Aquanaut以測試其性能。
水下變形金剛:Aquanaut的用途
休士頓機電一體化公司(HMI)是個初創企業,這裡的工程師們想徹底改變水下航行器的現狀,而Aquanaut將成為一個里程碑。傳統的UUV大致分為兩種:可執行遠端探測任務的魚雷式水下航行器;可實現水下操作的無人遠端控制水下航行器,這類航行器通常需要其他船舶輔助監督或控制。HMI創造性地將兩者結合為一體,雖然經常開玩笑說要打造一個變形金剛,但HMI的工程師們對Aquanaut卻十分有信心。
海上油氣開發公司大都需要建立一個海上平台,人們從這個平台表面開始進行水下鑽井作業。雖然我們看到的只有海面平台部分,但大量的高端設備實際存在於海面之下。
為了執行日常的鑽井口維護,或者調整天然氣的輸送量,就需要轉動位於水下300公尺的鑽井閥門,這靠潛水員是無法做到的,唯一的方法就是水下機器人。
海底的鑽井口使用特製的井蓋,用以控制將天然氣輸送到海面。整個結構還包含管道、閥門、氣體歧管和測量儀器,如此複雜,以至於人們稱之為「聖誕樹」。有些「聖誕樹」甚至有四層樓那麼深。
Aquanaut的主要功能是維護海底的石油和天然氣設備,運營這些設備的公司通常要花費大量的資金來維護它們。由於水下極端的工作環境,維修人員只能依靠機器人,但數十年來水下機器人技術並沒有實質性的變化。然而,對HMI來說,這並不是問題,它的75名員工裡有超過24名曾就職於NASA,處理極端環境正是他們所擅長的。
Aquanaut在潛艇模式下可以檢測深海底的油氣設備,在人形模式下可以手持特製工具轉動閥門來控制天然氣的輸送。開發人員將大部分低級決策交給其強大的機載電腦,電腦運行在機器人作業系統(ROS)上,這是一個用於研究和商業機器人的軟體平台。利用頭部的感應器套件,包括立體攝影機、結構光感應器和聲納系統,機器人可以對周圍環境進行詳細的3D算繪。與將整個3D地圖發送給操作人員不同,Aquanaut傳輸的只是非常小且高度壓縮的部分,然後操作人員可以將其與Aquanaut正在查看地形的現有模型進行匹配。最後發送簡單的命令,比如「將這些坐標的閥門順時針方向旋轉90度」,機器人會自主決定如何抓住閥門,以及施加多大的力,當任務完成時,它會發回確認訊息。操作人員仍在指揮機器人的動作,但不需要手動操縱機器人,也不需要高頻寬的即時視訊輸送。
在過去,想要控制這種深水閥門,就必須遙控無人潛水器(ROV)到達指定位置。然而,僅僅是ROV還不夠,還需要派遣一隻訓練有素的技術人員隊伍乘船對ROV進行操控,因為ROV本身的自動化程度不高且受制於遠端控制。這個過程是十分燒錢的,每天會花費數萬到數十萬美元不等。
那麼Aquanaut和傳統的ROV有什麼不同呢?
Aquanaut與ROV
相比於傳統的ROV,Aquanaut的主要優勢在於其操作不受限制,但HMI還須解決幾個關鍵問題才能實現這一功能。第一個問題是在沒有大型支援船隻的情況下將機器人送到離岸工作地點。Aquanaut可以部署在相對較小的船隻上,可以從直升機上降落,也可以在潛艇模式下自動行駛200多公里。一旦到達指定地點,就能轉換成ROV模式,額外的推進器摺疊起來隱藏進船體,使其更具可操作性。
傳統的ROV有多個即時攝影機,操作人員可以用操縱桿即時操縱。在沒有通訊電纜的情況下,與Aquanaut通信的唯一方式是透過聲波數據機。但這種成熟的技術在水下的使用範圍只有幾十公里,並且代價是高延遲和極低頻寬,最多每秒幾kb。HMI打算依靠小型無人水面艦艇作為機器人和通信衛星之間的中繼,減少人的參與,從而可以在世界任何地方控制Aquanaut。然而,這些限制使得直接的人為控制變得不切實際,所以Aquanaut需要盡可能自己完成任務。
技術人員只會監督而並不直接控制Aquanaut執行任務。任務完成,它就自動歸位。Radford說,這種工作方式不僅使Aquanaut的配置比ROV更便捷,而且成本也會減少近一半。Aquanaut不需要其他輔助船隻。它可以在潛水艇模式下游到深水鑽井旁的指定位置,然後展開雙臂切換到人形模式。每一隻胳膊都裝有力矩感應器並且可以向八個方向移動,就像人的胳膊一樣,胳膊末端的「爪子」不僅可以轉動深水井的閥門,還可以從它的「內臟」取出維護工具進行維護作業。
商用價值
據海底技術專家,現任華盛頓哥倫比亞特區ROV,海上技術協會主席的Chuck Richards所說,過去幾年,石油低價造成石油公司的利潤下滑,競爭激烈,這使得它們不得不採用新的技術。Richards位於休士頓的公司,向包括HMI在內的數十家從事海洋業務的公司提供新設備。這意味著,儘管這些公司對Aquanaut這樣的科技新秀仍然持謹慎態度,但同時它們也期待著這些機器人可以大展身手。
Richards談到,自1970年商用ROV,其優勢不斷顯現,儘管一開始這一技術並非嫻熟,但卻非常受海洋油氣業的歡迎。他說:「石油公司很耐心地等待ROV技術的成熟,並且給予了很大的幫助,因此,有理由認為這些更加自動化的水下航行器也會受到同樣的歡迎。」
未來路途遙遠
HMI的聯合創始人兼首席技術長Nic Radford,曾在NASA的休士頓詹森太空中心工作了14年,主攻尖端機器人專案。他表示:「飛入太空比潛入海底要難,但太空很安靜,而海底卻極其動盪。海底機器人的工作難度到底是太空機器人的10倍還是50倍,這個還真不好說。」
休士頓大學機械工程學教授、國際海底工程研究所所長Matthew A. Franchek表示,Aquanaut的低頻寬連接和操作人員間歇性參與決策,可能會帶來更大的出錯風險。他說:「不確定性是存在的,我擔心在操作過程中出現故障,這可能會帶來經濟損失和對環境方面的破壞。儘管這項技術令人興奮,他們還需要證明其可行性。」

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!