
ADVERTISEMENT
不管整理幾次,充電線、耳機線還是纏成一團。現在不用怕了!加州大學研究出了一款機器人,可以輕鬆理順資料傳輸充電線。

有網友對這個研究結果「相見恨晚」:
就不能在Air Pods出來之前訓練出這個機器嗎?
有了這個機器人,就再也不怕那「不聽使喚」的線了。機器人會整理這些纏繞的線,它是怎麼工作的呢?
工作原理
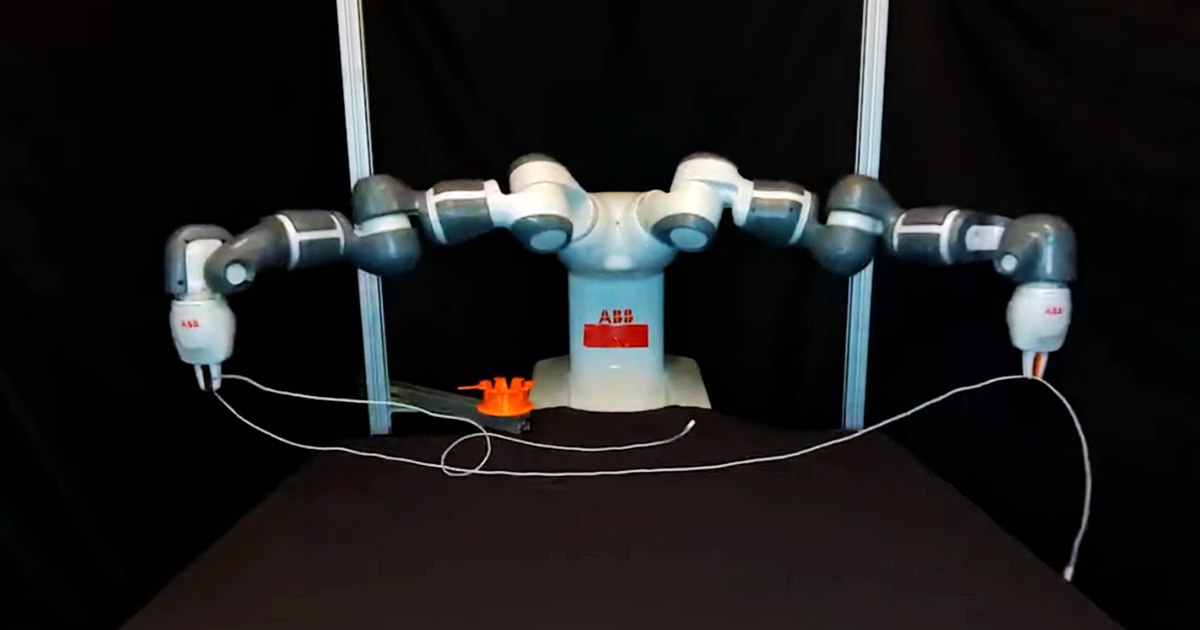
雙手機器人透過感知即將處理的線,使用兩個夾鉗來理順它們。
在整理線的過程中,機器人的特殊構造以及各個系統等都要起到很重要的作用。
首先是它的夾鉗結構,這個夾鉗(PC)觸手既可以鉗式(pinch-pinch)抓取,又可以籠式(cage-cage)抓取,也可以二者相結合(pinch-cage)。
鉗式抓取時線不能任意滑動,而籠式抓取和兩者結合抓取時,線能夠滑動。籠式抓取可以在解結操作中用到,鉗式、籠式結合抓取一般用來檢測線有沒有打結。多種抓取模式可以讓機器人進行更多的操作,並且很適合整理較長的線。
其次是機器人的感知系統,它可以獲知整理線的過程中這條線的「狀態」:纏繞方式,打結的數量,何處打結,進而影響機器人的後續操作。
具體來說,感知系統包括端點探測,即時追蹤線,結點探測等。
端點探測是指感知要整理的線的兩個端點,確保可以進行下一步操作。
即時追蹤線是透過感測器來探測整條線,從起點開始,追蹤到交叉點就停止。
節點探測是用於檢測整根線中的結點個數,單純的交叉點並能不算在其中。 感知到要處理的線的「狀態」之後,就意味著要進行操作了。
那麼在整理的時候,兩個抓手都可以進行什麼操作(操作指令)呢?
1、Reidemeister移動:這個操作是在整理時的第一個動作,兩個抓手抓住兩端的結點,然後將其拉向兩端,使線上的打結處都展現出來。
2、搖晃:晃動纏繞的線主要有兩個用處,其一是當線的兩端很難找到,無法進行Reidemeister移動時,通過晃動來尋找端點,其二是搖晃可以使打結處鬆動,更利於後續操作。
3、物理追蹤:整理線時,需要一個臂緊抓住線的一端,另外一個臂滑動追蹤打結處。
4、結點隔離:當解開上一個結時,就要立即執行這個操作,把已經處理好的部分撥到一邊。
5、雙籠分離:這個是解開打結處的一個重要動作,兩個抓手抓住節點內的兩點,然後向兩端拉開,結就打開了
瞭解完這波機器人的操作指令後,就可以來看看這些指令是怎麼運用到實際操作中的?
整個理線的核心就是抓滑系統(Sliding and Grasping for Tangle Manipulation,簡稱SGTM),透過抓取和滑動等一系列操作來解開纏繞的線。
SGTM從辨識端點開始。如果兩個端點都可見,那麼它將繼續進行Reidemeister移動(指令1)。
如果看不到端點,它就會晃動(指令2)線,直至可以探測到兩個端點,然後進行Reidemeister移動。
接下來會用感知系統進行結探測,如果遇到結,執行雙籠分離操作(指令5)以解開它,然後返回第一步。
如果沒有檢測到結的存在,將執行物理追蹤(指令3),這次追蹤未檢測到結的存在的話,線就整理完畢。
但若在物理追蹤時發現額外的結,則該結被隔離(指令四)並放置在工作空間中,演算法返回到結探測步驟。
到這裡,機器人如何整理纏繞的線我們也都明白了。那麼它整理這些線的效果如何?
最長可整理公尺米的線
在加州大學團隊的研究中,這個機器人最長可成功解開3公尺的資料線。並且當線中存在一個結時,機器人解開的成功率為 67%,存在兩個結時,解開的成功率為 50%。
資料來源:

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!