
ADVERTISEMENT
人工智慧(AI)演算法、行動機器人和無人機(無人機)等新興技術使得電影攝影如虎添翼。
近年來,許多電影攝影師和娛樂公司開始探索使用無人機來捕捉高品質的空中影片片段(即從高空中拍攝特定地點的影片)。薩拉戈薩大學和史丹佛大學的研究人員最近創建了CineMPC,它是一種運算工具,可以用來自動控制無人機的機載攝影機。
這項技術,即將在arXiv上發表公開論文,據介紹,CineMPC可以顯著提高目前基於無人機的電影攝影品質。

這項研究的研究人員之一巴勃羅‧普耶奧說:「現有的關於自主電影攝影文獻中,自主拍攝無人機的解決方案專注於控制相機的外在部分(例如,相機的位置和旋轉)。然而,最新的電影攝影文獻中表明,決定鏡頭好壞的決定性因素是控制好相機鏡頭的內在參數,如距離、焦距和對焦孔徑等等。」
相機的固有參數(例如,焦距、長度和孔徑)是決定圖像的哪些部分處於聚焦或模糊的參數,這些參數最終可以改變觀看者對給定場景的感知。透過改變這些參數,電影攝影師便可以創造出特定的效果,例如,產生不同景深的鏡頭,或者有效地縮放圖像的特定部分。
普耶奧和他的同事們最近工作的總體目標是:以自動產生這些特效的方式,完成對無人機運動的最佳控制。
在之前的一項研究中,普耶奧和同事們開發出了一種叫做電影AirSim的方法。
這種技術能夠用一個可控的車載電影攝影機來模擬無人機。透過將CinemAirSim與他們開發的新演算法CineMPC整合,研究人員能夠模擬鏡頭固有參數的特定變化,拍出無人機拍攝的效果。
普耶奧解釋道:利用著名的模型預測控制(MPC)演算法,優化無人機相機的內外參數,以滿足使用者給出的藝術和構圖要求。MPC可以找到配置相機的最佳參數,進而最小化使用者定義的成本函數。成本函數是數學表達式,用來控制景深、標準鏡頭或場景元素的位置等參數,以及演員在結果圖像的特定位置。
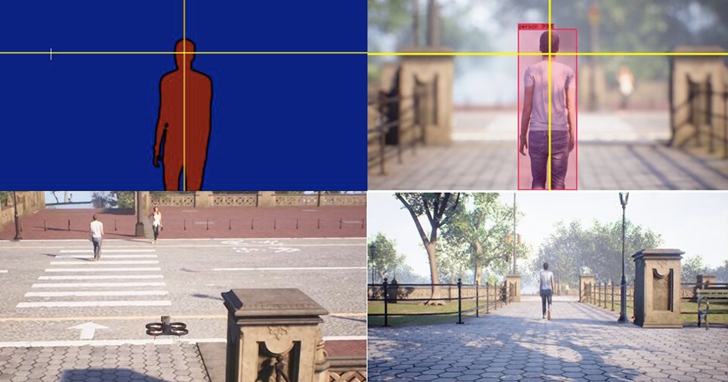
CineMPC可以檢測場景中的特定對象或人,並通過使用者指定的特定相機軌跡對他們進行跟蹤。值得注意的是,該近似軌跡還包括與最理想的內在參數相關的特定訊息。
「據我們所知,到目前為止,還沒有現成的透過最佳化相機鏡頭的參數來實現電影特效的解決方案。所以,這項技術在自主無人機拍攝方面非常實用。非專業的電影攝影家可以利用這個解決方案,透過調整攝影機的外部和內在參數滿足電影特效的要求。」普耶奧說。
未來,這一新工具可以增強無人機的電影攝影能力,電影製作人可以從鳥瞰圖中捕捉到更高品質的鏡頭。事實上,與之前開發的方法相比,CineMPC允許研究人員不斷地調整相機的內在參數來實現特定的藝術效果。
普耶奧說:「我們現在正計畫用更複雜的藝術和機器人的想法來改進CineMPC。例如,引入更多的無人機拍攝(即設計一種多機器人的方法),並對藝術智慧化進行最佳化,以確保無人機能夠自主地實現最佳的藝術效果。」

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!