
ADVERTISEMENT
機器人僅用24小時將十萬塊多米諾骨牌拼出瑪利歐圖案,創下世界紀錄!

十萬塊多米諾骨牌倒下是什麼樣的場面? 十萬塊?那得排多久啊?
這工作量算是相當巨大,普通人的話可能要耗時幾個月,就算是找來7個最厲害的多米諾骨牌專家,也要花一個星期的時間。
萬一搭建到一半,一不小心碰倒一塊……
那如果讓機器人來搭要多久呢?
答案是:24小時
不可思議吧!
前NASA工程師 Mark Rober最近在YouTube 上公開了他與團隊用時兩年的最新成果——多米諾骨牌終結者機器人。
它可以在短短24小時之內將10萬多塊多米諾骨牌變成一副瑪利歐的圖畫,鋪滿整個體育場,還創造了世界紀錄!
如何完成24小時內拼出十萬兩千塊多米諾骨牌?
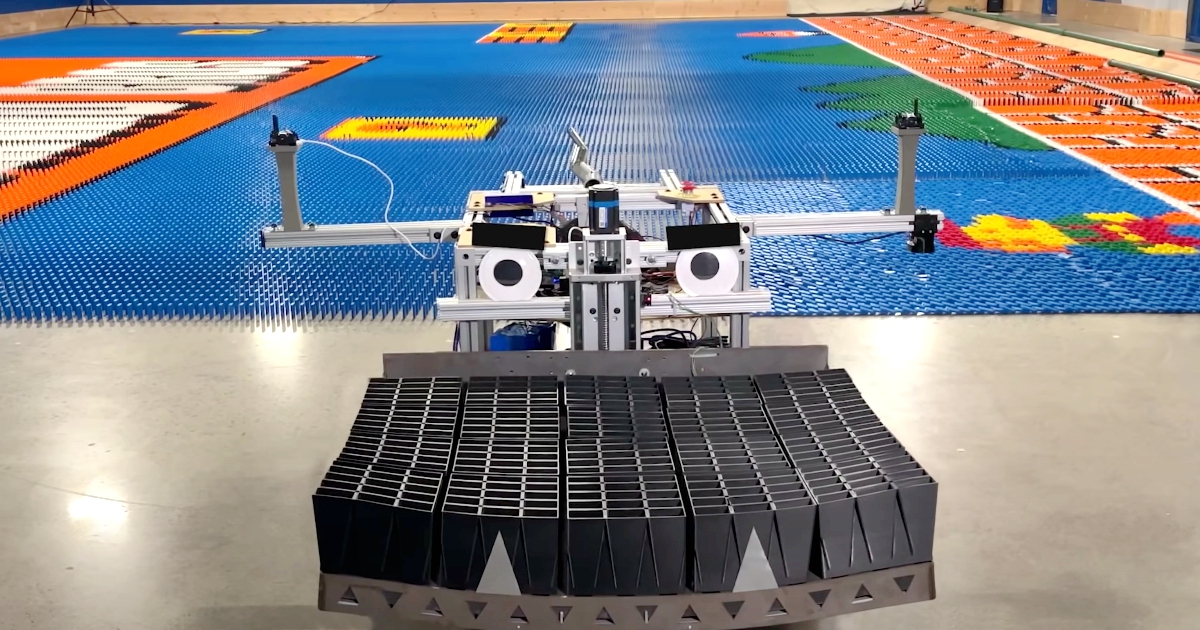
Dominator(多米諾終結者),這麼霸氣的名字,一出場卻是個小可愛,大大的眼睛,鋼架構成的臉龐,還有個可愛的小尾巴搖來搖去。
做起事情可是毫不含糊,它一次可以擺放300多塊小骨牌,完勝人類多米諾大神。
托盤頂部是由3D列印製作的漏斗,下面則是用於放置骨牌的固定網格;網格下面帶有鋼底板,只有在觸動底部的機關時,鋼底板移動,300多塊骨牌就會被整整齊齊地擺放在指定位置!
當漏斗裡所有的骨牌擺放好,機器人回到填充站,這是由機械臂和300多個2.7公尺高的軌道組成,骨牌會按照顏色用傳輸帶傳送上來,機械臂提前按照順序放在300個軌道裡,這樣機器人在填充時,只需要滑動底部鐵架,300多塊骨牌可以一次性完成填充。
補充完骨牌後,前往下一個目的點繼續多米諾骨牌的搭建。
那麼,機器人是如何知道該去哪裡放骨牌呢?
團隊對十萬兩千多個多米諾的路線進行了程式設計,這樣機器人一開始就知道自己要去哪,行駛的過程中,使用內建的GPS進行定位,並用相機辨識地面上的標記,確保機器人每次都能完美擺放。
總結一下創下世界紀錄的過程:
- 提前設置好Dominator機器人;
- 關燈走人;
- 第二天回來,十萬兩千塊、一整個體育場的多米諾骨牌就完成了!
沒那麼簡單,要解決的三大難題
這項工程,絕對沒這麼簡單!
Dominator 的創造並非一帆風順,從最開始的設計到最終的Dominator,不停的最佳化刪改,前前後後共有 11個原型。
這個過程中,主要面臨著三大難題。
第一個挑戰,是多米諾骨牌規模太龐大
團隊低估了十萬塊多米諾骨牌的規模,最初他們設想機器人直接攜帶上所有骨牌並一塊一塊地擺放。但是團隊進行計算後發現 10 萬塊骨牌有 850 公斤重,並且即使以 3 秒/塊的速度擺放也至少需要三天半的時間。
因此他們不得不改變最初的想法,改用托盤裝下一部分擺放好的骨牌,再去填充站填充。
第二個挑戰,是骨牌的擺放位置要極其精準
玩過的人都懂,每塊骨牌的擺放位置是極其精妙的:
放置得要足夠近,才能讓骨牌倒下後碰倒其他骨牌;但是又不能將骨牌放得太近,否則擺放過程中就有可能把骨牌碰倒導致前功盡棄;同時,機器人本身也必須要有準確的定位,否則也會將已經擺放好的骨牌碰倒。
團隊一開始嘗試超音波感測器判斷骨牌與機器人的相對位置,但後來被證實是失敗的;後來該團隊又嘗試了 Marvlemind 室內GPS感測器,發現這也達不到想要的效果。
最終,Dominator 採用了GPS來定位機器人的大致位置;並在地面上設置了小型紅外線反射標記,用於精確定位骨牌的擺放位置,紅外線地面攝影機會查看地面上的標記,並將其與它們對齊;位置定好後,托盤會被一個步進電機和滾珠絲桿元件降低;Raspberry Pi 4 負責一切,包括透過 USB 控制電機和從筆記型電腦接收命令。
第三個挑戰,選擇合適的驅動系統
即使解決了定位問題,如果沒有合適的驅動系統讓機器人正確控制自己的運動,那依然會前功盡棄。
團隊最初嘗試了步進電機,但無法承載三百多塊骨牌,並且 Arduino控制的機器人速度太慢。隨後,換成直流電機的效果更糟,電機速度太快,無法在低速時提供足夠的扭矩來很好地控制機器人,甚至導致機器人失控瘋狂旋轉。
最後,Mark尋求了好友的幫助,他們選擇了使用ClearPath伺服系統驅動全向輪,它能夠非常準確並提供大量扭矩,增加皮帶減速器以進一步提高輸出扭矩,確保車速的同時也不會讓車輪打滑。
四個人,耗時兩年
Mark Rober是何許人也?
他是Youtube網站上的知名up主,作為美國國家航空航天局NASA的前工程師,他以知識科普以及各種有趣的發明和實驗聞名,有些實驗甚至有些瘋狂。
例如,為了打造最強蹦床,從45公尺垂直墜落一台汽車、為了破除大眾對於「鯊魚嗜血」的迷信,去海上放血吸引鯊魚; 還有使用高壓氮氣的巨型玩具水槍、可以連射雪球的「雪仗專用槍」、和用火箭驅動的加速高爾夫球桿……
而這次的Dominator並非 Mark Rober 自己的成果,是四人團隊多年工作的結晶,而團隊的結合始於Mark 2019年在舊金山市灣區舉行的一次演講,他在演講中說一直想製作一個機器人,利用這個機器人能夠在一夜之間將成噸的多米諾骨牌搭起來,並填滿整個體育場,但進行過一些嘗試後沒有成功。
這個想法吸引到了 Alex Baucom 的興趣,他有過開發機器人的經驗,也吸引到了史丹佛機械工程專業的學生 John Luke 和 Josh。四人一拍即合,於是Dominator團隊就此誕生。
耗時兩年,多次失敗,11個機器人原型,只是為了一個瘋狂的想法,這種精神實在是太了不起了!

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!