
ADVERTISEMENT
NVIDIA執行長黃仁勳於美國華盛頓特區舉行的GTC DC大會中,展示Vera Rubin Superchip以及相關產品,並說明透過數位孿生技術規劃超級資料中心,以及針對機器人應用的物理AI。
無纜線設計
黃仁勳先前已於Computex 2024 CEO Keynote演說中提到Vera處理器(CPU)與Rubin繪圖處理器(GPU)等產品命名,到了GTC 2025也再次說明更多技術細節。
延伸閱讀:
NVIDIA於GTC DC 2025大會(上):當AI摩爾定律放緩就用加速運算與外部擴展解決問題
NVIDIA於GTC DC 2025大會(下):Vera Rubin Superchip登場,打造超級資料中心數位孿生與物理AI(本文)
Computex 2024:NVIDIA CEO 黃仁勳 Keynote 重點整理,揭露下代運算平台規劃
【GTC 2025】黃仁勳演說深入分析:提出「終極摩爾定律」,追求相同耗電更高效能
NVIDIA於AI Infra Summit 2025發表Rubin CPX GPU,透過分離運算提升6倍AI推論效能
Hot Chips 2025:NVIDIA發表Spectrum-XGS Ethernet,實現Scale-Across分散式運算
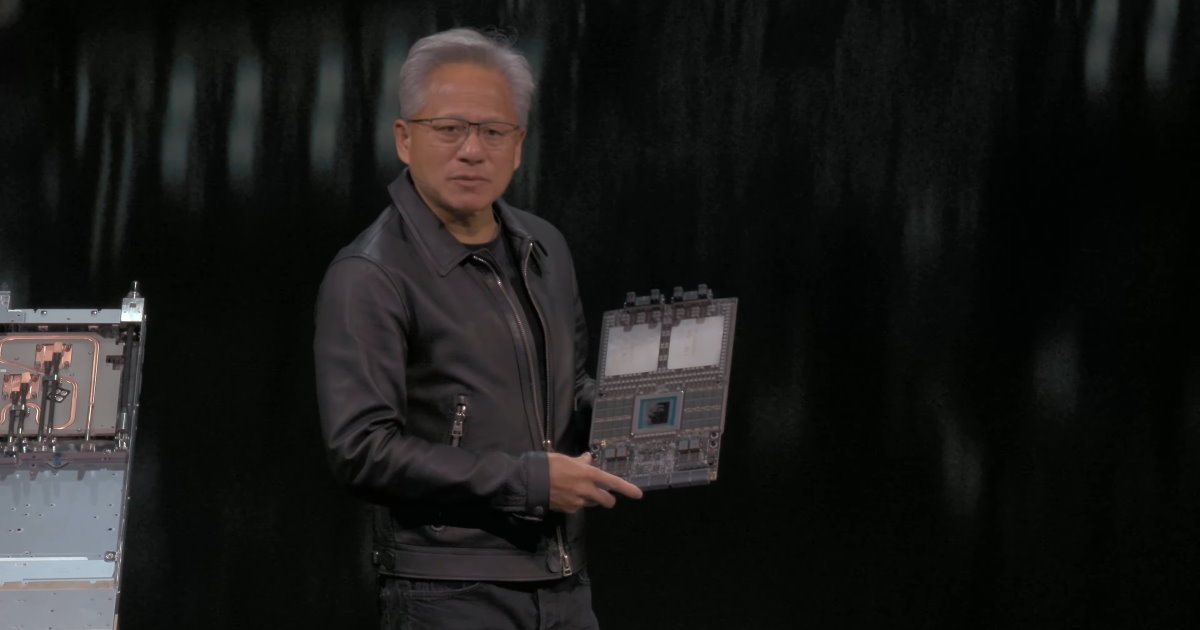
Vera Rubin Superchip的整體設計與先前Grace Blackwell Superchip,電路板上具有1組Vera CPU晶片封裝(總共具有88核176緒配置的客製化Arm架構處理器核心),以及2組Rubin GPU晶片封裝(總共具有4組GPU裸晶)。
比較特別的是它採用無纜線連接,Vera Rubin Superchip與伺服器主機板透過插槽連接,而不再需要纜線,能夠改善伺服器內部空間以及散熱效果。

擬真物理環境訓練機器人
黃仁勳表示開源模型對AI生態系的發展相當重要,讓更多開發者能站在現成AI模型的基礎上,開發更多元的應用程式或是客製化微調模型,而NVIDIA也響應這個觀點,推出Nemotron(代理式AI)、Cosmos(物理AI)、GR00T(機器人)、Clara(生物醫學)等多種開源基礎模型。
另一方面,NVIDIA的Omniverse平台適合用於建立數位孿生,這次發表的Omniverse DSX Blueprint是針對超級資料中心(Gigascale AI Factory)設計的工作流程範本,讓廠商能進行氣體與液體管線、配電、伺服器設置的設計,並在虛擬環境中驗證可行性並進行最佳化,待確認無問題之後再進行施工,以簡化整體工作流程。
Omniverse平台也能用於機器人的AI模型訓練,搭配物理AI與模擬功能,讓虛擬環境也能反映真實的物理行為,提高訓練的成效。
▲透過Omniverse平台以數位孿生方式設計資料中心,能夠簡化整體工作流程。
▲從影片中可以看到啟用物理模擬後,能讓機器人在更擬真的虛擬環境中進行訓練。
對GTC DC 2025大會有興趣的讀者,可以在NVIDIA的YouTube頻道觀看開幕演說影片重播,以瞭解更多資訊。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!