
假如現在你要乘坐一輛已經沒有駕駛的無人駕駛汽車上路,並且在高速行駛中,請問你最關心什麼問題?擔心車自己迷路?開的太慢?路上太寂寞?
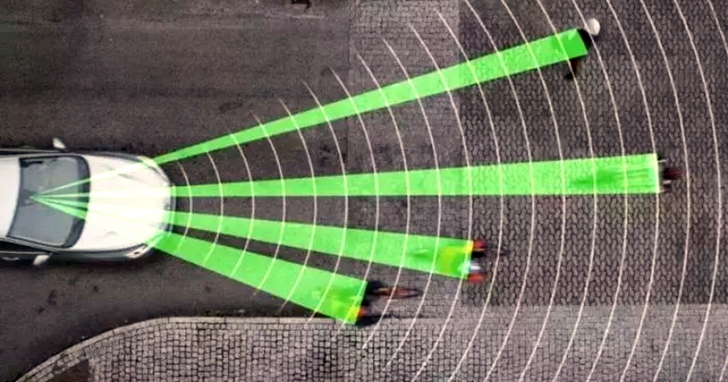
你最關心的大概就是這輛車是不是安全的。相較於依靠駕駛視覺來保證行駛安全的傳統汽車,自動駕駛汽車依靠大量各種感應器來行駛汽車的「視覺」功能,而且越高等級的自動駕駛就會採用更多的感應器系統。
超過人類駕駛的安全可靠性,才是自動駕駛得以成立的根本前提。

目前,為保證安全性,自動駕駛感應器系統主要由攝影鏡頭、光學雷達、毫米波雷達這三套件組成。而這三套件幾乎在現有的無人駕駛感應器解決方案都可以找到。
然而在現在還處在輔助駕駛階段的車輛上,毫米波雷達、光學雷達、攝影鏡頭這三套件並不是不容改變的一塊。堅持走攝影鏡頭路線的特斯拉,其掌門人馬斯克就一直多次「噹」光學雷達,但業界又紛紛反擊,認為只有光學雷達才是自動駕駛感應器系統的核心角色。
相比之下,毫米波雷達卻是感應器三套件中最沒有爭議的存在了。在目前支援自動駕駛以及先進駕駛輔助系統(ADAS)的解決方案裡,都採納了毫米波雷達。
毫米波雷達具有傳輸距離遠,性能穩定、成本可控等優點,但其同樣也存在角度解析度弱、辨識精度低等缺陷。在現有自動駕駛的多感應器融合的背景下,搞清楚毫米波雷達的優劣勢,以及最新技術演進的趨勢和在自動駕駛產業中的價值,成為我們是否要選擇重點發展毫米波雷達的重要依據。
兩利相衡取其全:毫米波的應用優勢
毫米波雷達在汽車領域的應用其實已經多年,最初加入汽車感應器當中主要是為了實現盲點監測和定距巡航,而隨著技術的發展這兩個特性也漸漸從高端車型普及到了幾乎所有車型。而隨著自動駕駛以及ADAS對於行駛環境高精度感知的需求,毫米波雷達憑藉多種優勢在其中發揮了重要的作用。
所謂毫米波指波長介於1~10mm的電磁波,毫米波的波長介於釐米波和光波之間,因此毫米波兼有微波制導和光電制導的優點。
毫米波雷達則指工作在毫米波波段的雷達。毫米波雷達透過天線向外發射毫米波,接收目標反射訊號,經計算後快速準確地獲取汽車車身與其他物體直接的相對距離、速度、角度、運動方向等,再交回車輛的中央處理單元( ECU)進行智慧型處理和決策。
光學雷達(LiDAR),其工作原理是以雷射作為訊號源,由雷射發射器發射出的雷射光束來探測目標的距離、方位、高度、速度、姿態等特徵量。由於雷射光束不斷地掃瞄目標物,可以得到目標物上全部數據點,經過3D成像處理後,還可得到精確的3D立體圖像。
二者的性能特點有哪些明顯的優劣勢對比呢?
首先,在探測精度和解析度上,光學雷達明顯優於毫米波雷達。例如,毫米波雷達和光學雷達同時發現道路前方的「障礙」,前者可能只能「看到一個模糊的形狀,而後者則可以清楚地區分」 這個障礙是路肩還是斜坡,而車輛判斷為斜坡後,就可以做出安全前進的決策。
其次,在抗環境干擾上,毫米波雷達則顯著優於光學雷達。由於光學雷達使用的是光波段的電磁波,透射與繞射性能補強,在遇到雨雪、霧天、霧霾、灰塵等環境,其探測性能將大幅下降。而相比較於光學感應器,處於毫米波波段的電磁波則不會受到雨、霧、灰塵等常見的環境因素影響,因此,毫米波具有全天候(除大雨天氣外)、全天時的強抗干擾的探測性能。
而在抗訊號源干擾上,與毫米波雷達易受自然界中的電磁波影響不同,自然界中能對光學雷達的干擾的訊號源極少。因此光學雷達的抗訊號源干擾能力更強一些。
此外,在探測距離上,由於毫米波在大氣中衰減弱,所以可以探測感知到更遠的距離,中遠程毫米波雷達可以達到250公尺的探測距離,而光學雷達最遠只能達到200公尺。因此,在高速行駛過程中,毫米波雷達能夠可以比光學雷達更早地判斷前方的障礙物的狀況,做到安全提醒或者緊急煞車的判斷。
另外,在製作工藝和成本上,毫米波雷達則明顯優於光學雷達。基於毫米波波長短,天線口徑小,毫米波雷達具有體積小、重量輕、易整合等特性,容易安裝在汽車上;而光學雷達由於內部構造複雜,對製造工藝要求很高,產品體積較大,安裝難度高或者美觀性差。同時,在成本上,毫米波雷達的價格可以控制在不到萬元,而性能較好的光學雷達仍然要到十數萬元。
目前,對於光學雷達,除了小型化、美觀化的問題外,降低成本成為追求量產的製造商來說就是頭等重要的事情了。而對於毫米波雷達,提升其測量解析度和精確度,則成為當務之急。
超長距離+高解析度,毫米波雷達的升級新優勢
相比較光學雷達以及攝影鏡頭而言,基於測量距離遠、全天候穩定工作以及成本低的特性,毫米波雷達毫無疑問地廣泛應用於自動駕駛車輛當中,但其在探測精度上的短板也需要持續的技術迭代來補足。
按照毫米波頻段劃分,目前車載毫米波雷達頻段主要3個,24GHz、77GHz和79GHz。前者主要負責短距離探測,後兩個頻段主要負責中長距離探測。
第一個趨勢是,現在全世界主要廠商都主要向77GHz毫米波雷達的應用集中發力,並向79GHz頻段的技術突破。相對於24GHz雷達,77GHz毫米波雷達體積更小;此外,可以同時滿足高傳輸功率和大工作頻寬,使其可以同時做到長距離探測和高距離解析度。
77GHz毫米波雷達的領先優勢也意味著實現的技術門檻很高,其在天線、射頻電路、晶片等的設計和製造難度更大,目前僅有美日等國的少數企業掌握,而79GHz頻段在頻寬上比77GHz要高出3倍以上,解析度更強,目前尚未有大規模量產。
第二個趨勢是,在毫米波雷達的系統整合工藝上,CMOS(互補金屬氧化物半導體)工藝正在成為主流。除了降低成本外,CMOS主要可以整合MCU、DSP等額外數位模組,進而讓雷達晶片的控制甚至數位訊號處理能夠在本地完成,而無需再配備專用的處理器,降低了系統複雜度和成本。
另外一個重要趨勢是,毫米波雷達的空間解析度的提升。在盲點監測中,高解析度毫米波雷達要實現從原來只判斷安全距離內有無物體,到形成環境建模,判斷雷達點雲(point cloud)中每個點對應的具體物體(人或車等)的形狀。實現這一特性的方式就是在毫米波雷達晶片中增加整合的收發機的數量。
提升系統整合和增加收發機數量代表著自動駕駛的兩種技術應用方向。前者主要針對輔助駕駛,由於對成本和雷達模組複雜度更為敏感,輔助駕駛的汽車更在意CMOS系統整合帶來的模組複雜度的降低。而L4-L5自動駕駛,更在意毫米波雷達對於空間的解析度以獲取更高精度的點雲,因此更在意收發機的數量。
從以上趨勢,我們看到,毫米波雷達從探測距離到高精度解析度、空間解析度都在盡可能彌補缺陷以提高探測精度,進而向光學雷達發起挑戰。同時由於光學雷達也在盡可能地降低成本以鞏固其市場佔有。因此,二者在未來很長仍將會被長期組合使用,與攝影鏡頭、超聲波感應器等形成多感應器融合應用的態勢。
多感應器融合:毫米波雷達的應用終局
以上可知,毫米波雷達無論對於L1-L3輔助駕駛的汽車,還是對於激進實現L4-L5完全自動駕駛的汽車來說,都仍然是必須的感應器設備。
對於新增輔助駕駛來說,毫米波雷達可以在原有的盲點監測、定距巡航等應用上,進行一些漸進式擴展,成為像自動換線等輔助駕駛功能的支援感應器系統。
而對於高等級自動駕駛來說,高精度毫米波雷達將是其無人駕駛系統可靠性的重要保障,結合光學雷達和攝影鏡頭傳感這三套件感應器融合,可以實現所有氣候環境下的自動駕駛。
在行駛安全高於一切的原則下,沒有毫米波雷達的無人車恐怕無法應對因時因地變化的複雜路況環境和天氣狀況,因而也就不可能讓無人駕駛汽車全天候上路了。
在已經出現的自動駕駛的安全事故當中,關鍵感應器誤判與缺失仍然是主要的原因之一,比如16年一輛處於輔助駕駛狀態的特斯拉,因攝影鏡頭沒有辨識轉彎的白色卡車,同時也沒有安裝光學雷達,造成誤判而撞上卡車。另外,多個不同種類的感應器的可能矛盾的訊息檢測也需要得到迅速的處理。
在使用多種類感應器,確保安全可靠性上,自動駕駛系統就必須要對感應器進行訊息融合。多感應器融合,意味著自動駕駛的計算平台要從算法上對攝影鏡頭、光學雷達、毫米波雷達探測的訊息數據做好優先級排序和決策,進而保證自動駕駛系統決策的正確性。
對於毫米波雷達來說,其在自動駕駛的感應器系統的重要性以無需贅言了,相比較仍然飽受爭議中的光學雷達,甚至可以直接接過自動駕駛三套件的「C位」擔當了。
伴隨著毫米波技術向更高頻段的不斷升級,同時自動駕駛的產業規模也同步擴大。無論是技術潛力還是市場潛力,都為毫米波雷達的發展預留出巨大的提升空間。
- 本文授權轉載自腦極體

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!