
兩周前結束的DARPA機器人挑戰賽上,來自韓國科學技術院KAIST的團隊成為一匹以外的黑馬,打敗其它在賽前注目度高出很多的強勁對手,奪得了這項堪稱有史以來最引人注目的機器人大賽的冠軍,獨享高達兩百萬美金的大獎。
南韓的機器人DRC-HUBO擊敗了其他來自5個國家的22台頂尖機器人,其中最有名的對手,包括 Atlas、HRP 這種「明星級」機器人。
Atlas,由機器人界在研究多足行走幾乎是第一把交椅的Boston Dynamics所研發。HRP,則是研究兩足機器人多年而且也享有盛名的日本公司川田工業所開發。

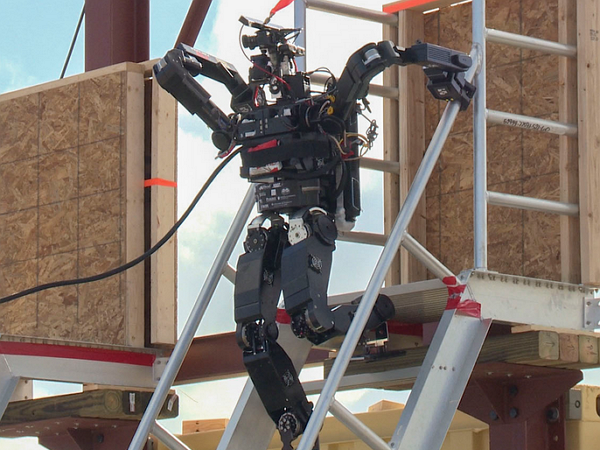
南韓的DRC-HUBO呢?長的像是下面這樣:
與它的同事比起來,DRC-HUBO顯得好像有點弱?事實上,與上述兩個機器人最大的與眾不同之處,也是其成功秘訣之一,當屬其「變形能力」——其膝蓋和腳踝處裝置的輪子,可以允許機器人由行走模式切換到輪式移動。
DRC-HUBO可以通過跪下和起身,自行完成兩種運動模式間的切換。它的其它同伴,很多競爭者的機器人在完成一些和外界接觸的任務時,便會失去平衡倒下,比如:開門、使用電鑽等。但HUBO的設計並不會有這種「後遺症」。它獨特的設計讓它能夠更快地完成任務,同時幾乎不會摔倒。
「機器人的雙足行走還無法做到很穩定,」帶隊的KAIST機械工程吳俊昊教授(Jun Ho Oh)對記者說,「平衡問題上任何一點小差錯,結果都是災難性的。」
他說,人形機器人擁有靈活適應人類環境的優越性,但是他同時希望找到一種能夠最小化摔倒風險的設計。「我想過很多種方案,其中最簡單的方式就是在腿上加輪子。」
比賽回顧
為期三年的機器人挑戰賽DRC是DARPA(美國國防高新科技計畫署)在受到福島核電站災難的刺激後決定舉辦的,期望借此計畫提升機器人用於災難應對的水準。
DRC決賽要求半自主的機器人和人類操作員合作,在預設的一系列災難狀況中連續完成任務。參賽的機器人五花八門,大小、形狀不一,多數為足式機器人,也有少數輪式,還有若干混合的。
DRC-HUBO憑藉以最快速度完成全部八項任務而奪冠。其他機器人也有能夠表現很好的,但是很多因為發生事故而耽誤了時間,包括唯一一台在摔倒後爬起的機器人CHIMP。
圖:CHIMP機器人
「靈活性也許是最重要的一點,」這次大會的組織者,機器人的權威 Gill Pratt 在一次發佈會上這樣評論機器人的不同設計。同時具有輪子和腿的機器人設計,雖然會顯得更重、更複雜,但是「能夠體現這種靈活性。」
HUBO機器人有何特別
吳俊昊教授是仿人機器人領域世界聞名的專家。他的團隊已經對HUBO機器人系列完成了幾次版本升級。
為了這次DRC決賽,吳俊昊教授對他們的機器人進行了全面性的、針對任務的改造。雖然在賽後的workshop上,他說DRC-HUBO是「沒什麼特別的,就是一個人形機器人」,但是事實上,KAIST團隊為HUBO訂製和重新設計了機器人的幾乎每一個部分。他估計DRC-HUBO的造價在50萬美金到100萬美金之間。
下面就讓我們來瞧瞧,這台機器人有哪些出眾之處,讓它能在DRC上一戰成名。
1、膝蓋上的主動輪
DRC-HUBO在雙膝上裝有主動驅動輪,腳上配有被動輪。四個輪子讓機器人能夠在平地上快速而穩定地運動。在使用輪子時,機器人使用小腿上面朝下的光學感測器進行光流定位。
2、強力電機
正如贏得去年DRC預賽冠軍,並隨後被穀歌收購的SCHAFT一樣,DRC-HUBO沒有使用液壓系統,而是用功率相當強的電機代替(機器人身上有33個電機)。電機配有的定制驅動和氣冷系統(風扇),讓其能夠承受超過電機額定值三到四倍的電流,在一些情況下峰值可以達到30安培,這意味著重達80公斤的DRC-HUBO擁有充足的扭矩輸出能力。
3、柔性關節
柔性關節能夠大大增加機器人對外界衝擊的適應能力,但是團隊擔心傳統的基於力-扭矩感測器的柔性實現方式會帶來系統的不穩定(力感測器通常存在較大的雜訊)。所以他們的做法是使用自己定制的電機驅動,用特殊的放大器實現柔性。
4、靈活的腰肢
DRC-HUBO 能夠讓其上身旋轉180度。這意味著它可以讓自己的膝蓋向後,同時讓眼睛看向相反的方向。這種功能在站立而下跪模式下都可以使用,並著實讓機器人在很多工作中獲得方便,包括開車、切割牆壁、爬樓梯等。
5、長臂
KAIST隊認識到HUBO 二代機器人的手臂對於DRC的需求而言太短了。於是他們重新為HUBO設計了更長的7自由度手臂,並將所有的線纜佈置在手臂外殼之內。每條手臂能夠拿起重達15公斤的負載,並配備一個「具有適應性」,能夠抓取或軟或硬物體的抓取器。
6、極簡單的「眼睛」
多數隊伍的機器人在頭部裝滿了各種感測器,包括立體視覺鏡頭、不停旋轉掃描環境的雷射雷達等。而DRC-HUBO使用了相對簡單的策略,大部分時間它僅依靠一個普通鏡頭來工作;配備的雷射雷達僅在必須時使用。事實上,這個機器人沒脖子和頭,「它只有眼睛,」,一個KAIST的學生這樣告訴記者。
7、穩定的電源系統
HUBO的電機有時會突然需要極高的電流,這會給機器人的主電源系統帶來嚴重衝擊,甚至會波及其他元件的供電(試想一下,機器人發力時突然控制器斷電是個什麼畫面)。為了避免這種情況,機器人配備了超級電容系統,讓電腦、通訊模組、重要感測器即使在主電源系統崩潰的情況下仍能繼續工作。
8、客製化的軟體系統
隊伍使用即時Linux作業系統Xenomai,和KAIST所開發的運動控制框架PODO。他們也使用了Gazebo模擬環境。機器人軟體系統設計所考慮的核心問題,是適應操作者和機器人間低頻寬、不穩定的通訊。
HUBO如何完成比賽
Hubo完成比賽可以說是一氣呵成,雖然沒有摔倒爬起的驚險鏡頭,卻也讓人看得十分過癮。
下面我們一個一個任務來分析。如果不想看細節可以直接拉到最後看結論。
1、開車
KAIST對車輛進行了規則允許的輕微改造,讓機器人能夠更舒服地踩油門和刹車。HUBO一手抓住車窗上沿固定身體,另一手握方向盤。HUBO完成第一個任務相當快,僅僅一分鐘多一點,因為它不像其他隊伍那樣在障礙物面前準備轉彎時會停下。
2、下車
下車幾乎是整個DRC最難的任務。為了做好它,吳俊昊教授自己先嘗試了多次下車動作。他的結論是這個動作需要動態進行而非穩定的靜態。機器人先用雙手抓住車窗,每只手施加100N的拉力,幾乎把身體輕微抬起,然後靈巧地從座位上滑下來。
下車之後,走兩步立即跪下,轉為輪式移動模式。
3、開門
HUBO不需要站著去開門。它輕鬆地用一隻手擰開門,用另一隻手優雅地推門而入。
4、開閥門
閥門位置較高,但這並不意味著HUBO需要站起來,它只要稍微抬起一點,就可以舒服地完成操作。
5、電鑽
任務要求機器人拿起普通的電鑽,用手撥開開關,然後在牆上打出一個圓。這關對機械臂操作有很高的要求。HUBO通過手上的力感測器穩穩地拿起電鑽,它甚至把電鑽的位置重新調整以獲得完美的抓握。操作者給出簡單的位置指令後,機器人自動開始畫圓,過程中保持電鑽上有20N的壓力。你可以看到它是如何靈活運用整個上身的運動,來畫出一個完美的圓。
6、意外任務
意外任務直到賽前才公佈,是將一根電纜插頭從一個插座上拔下來,插在另一個上面。這回,HUBO需要站起來完成任務。有意思的是,你可以看到HUBO如何通過雷射雷達的掃描發現垂下的電纜擋住了路,並通過邁步重新站到合適的位置。
插上插座是很不容易的。HUBO用手抓住電纜而非插頭部分,以保持清晰的視野。經過若干次嘗試,成功!完成任務用了13分鐘,是最耗時的一項。
7、雜物地形
這一關要求通過滿是雜物的一段通道。多數足式機器人選擇了走側面的磚石路,這也導致了多次慘烈的摔倒。而HUBO表現得十分聰明:它轉過上身蹲下,以腳底朝前的姿勢,像推土機一樣直接強行穿過雜物堆。
這也讓它在這一項上獲得相當的時間優勢——不到五分鐘完成。
8、上樓梯
最後的任務是爬上一段樓梯,對HUBO來說,這無異於登上領獎臺。這是它展示步態的最佳機會。你可以看到它轉過上身,以膝蓋向後的姿勢,一級一級登上樓梯。這種姿勢的好處是,機器人可以用頭看到自己的腳在哪裡——對於機器人行走,這是很重要的回饋資訊。場下其實比場上更強
KAIST為了比賽製造了四台DRC-HUBO,並從賽前一個多月就已經開始在無安全纜繩的情況下進行測試。他們測試過戶外場景,包括在一個地面粗糙的停車場,並測試過大風、強烈陽光在內的各種情況。在幾個月前指定賽題時,組委會還有點擔心決賽會不會太難。最終制定了題目後,Gill Pratt的想法是,即使沒人完成全部任務,這也是對機器人學的很大推動。
現在看來,Gill Pratt和組委會真是多慮了。
在賽後的發言中,吳俊昊教授表示,在訓練期間的HUBO就已經既可以用行走模式,也可以用跪下輪式模式完成所有任務,測試的平均用時僅僅30分鐘。HUBO尤其擅長用手清理雜物——為了最快取勝,這項技能沒能在比賽中展示,這讓韓國隊有點遺憾。同時,吳教授透露他們能夠在比決賽困難得多的地形上輕鬆完成任務。
「遺憾的是我們沒能夠在決賽上展示我們漂亮的行走動作......因為這任務太容易了!」
吳教授以這句話結束演講,在掌聲中走下講臺。

足輪混合的機器人並非首創,但是這個挑戰賽的目的就是要完善目前尚不成熟的雙足步行。象徵性的裝兩隻腳上去,然後把雙足步行會遇到的問題全都用輪子模式來解決,那就失去挑戰的意義了。