
做機器人不是Google的專利,日本早稻田大學最近與三菱電機合作開發出一款新型的機器人,這個機器人可以根據地形的改變,在雙腳行走以及四肢爬行之間不同的模式進行變形,以適應各種環境,還可以爬梯子,對於未來的救災作業將有很大的幫助。
目前在機器人的研究中,主要的應用範圍之一就是救災,而依照災難現場狀況,機器人如何適應各種地形持續前進,就是一大課題。現有的解法是包括有車輪型或是履帶型的機器人,雖然可以克服上下的坡度落差,但是對於需要爬梯、翻牆這一類的高難度動作,就無計可施了。

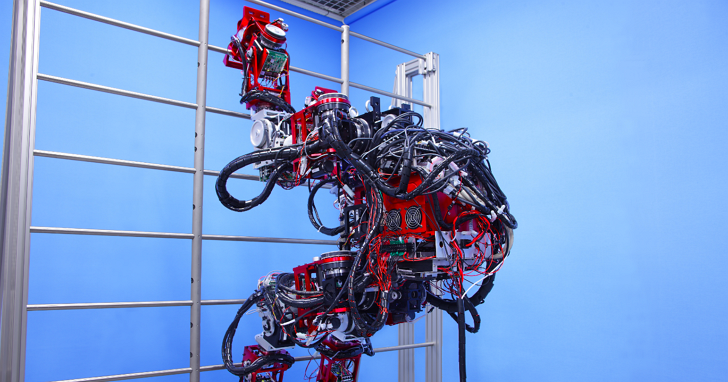
而由早稻田大學教授高西淳夫主導設計的這款機器人,在直立的時候約130公分,寬40公分,重量則為110公斤。這款機器人擁有四肢,並且可以實現雙腿平衡站立行走。但是在特殊地形時,則也可以變成四腳模式,在特殊地形前進。
2足歩行
匍匐移動
那麼,既然四肢前進比較穩定,為什麼還需要雙腳模式?研究人員表示雙腳模式主要是讓另外兩肢有需要發揮用途的時候使用,例如可以用兩條腿支撐向上移動,用另外兩肢來攀爬垂直的梯子。
根據早稻田大學表示,目前的類似研究,只能實現三腳在下方支撐,然後利用剩下的一隻腳來攀爬,但是這樣的設計速度緩慢。而根據他們的評估,採用這種雙腳機器人往上攀爬,會比過去的類似研究在速度上要快12倍,為機器人的一大突破。
資料來源:jst

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!