
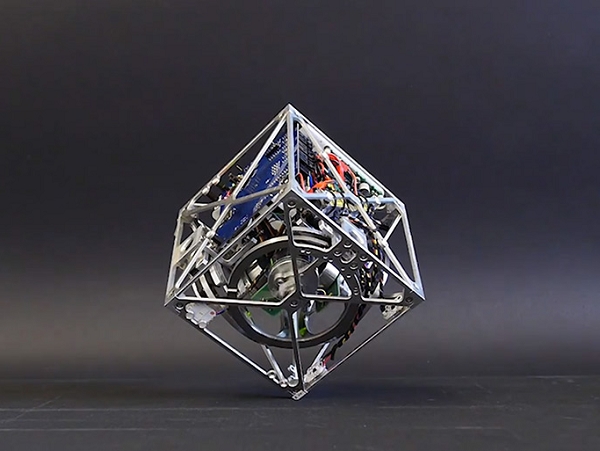

蘇黎世聯邦理工學院(ETH)的研究團隊最近做出一個正方體機器人Cubli,可以實現高難度的自平衡動作,單點或者單邊站立在平面或者斜面上,輕推也不會倒。
Cubli 內建了三個不同維度的轉輪,配合電機和電池作為運動系統,另外配有六個感應器,分佈在 Cubli 的每一面上,中心控制由內建的處理器完成。主要原理是透過調控轉輪速度和角動量來保持 Cubli 的平衡,人造衛星的平衡也是同樣的道理。
除了平衡,Cubli 還可以在平面上自由移動,透過突然改變轉輪的運動狀態就能讓它翻面,走的不算快,可能也不會比輪子系統的效率高,但是在自組織機器人或者太空探索方面可能更有用武之地。
ETH 可以算瑞士的 MIT,愛因斯坦之前也在這讀過書。之前 MIT 也出過一種叫M-blocks的盒子機器人,透過磁力快速自組裝。
![]()

搞不好未來機器人的平衡設計跟這個有關 (≧▽≦)