
設計並製造一個機器人一般都不是什麼簡單地事,需要設計人員耗費心血。因此,機器人設計通常需要建立在一個成熟的構思之上,即設計人員必須清楚他們希望機器人能夠做什麼以及如何做到。在此基礎上,設計人員才會開始構建原型機,然後發現設計中可能出現的問題,再提出更好的解決方案,循環這個過程直到時間或者經費耗盡。

但是,假如設計人員並未對機器人抱有較高的期望時,機器人的設計也未必需要如此複雜。
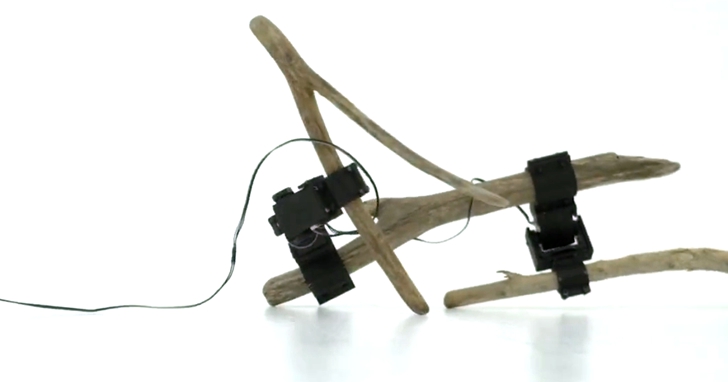
去年12月,來自東京大學和人工智慧公司Preferred Networks的研究者們在神經訊息處理系統大會(NIPS)上發表了一篇論文,他們對用幾個通用伺服驅動和隨處可撿的樹枝來搭建可移動機器人進行了實驗。
這些機器人先要通過深度強化學習在模擬環境中學會如何走路。
該論文稱,研究人員先拾取一些樹枝,秤重後進行3D掃描模擬出整台機器人。
對不同方案逐一實驗,最後對移動距離最遠的個體進行獎勵。
過程中需要部分手動操作以避免出現可能對機器人造成壓力和磨損的行為。
總的來說,這種策略並不能運用在大多數應用中。但可以預見的是,這種類型的機器人會在某些方面變得更加實用。它使人相信僅靠隨意抓取些物品(配上一些伺服驅動以及一或兩個感應器,如果需要的話)就能製作出一台可移動機器人。也就是說,憑藉基礎感應器提供的試驗、報錯和回饋訊息,你將能夠從無到有地搭建屬於自己的機器人。我們在其他機器人平台上也看到過類似的事情了。
用這類材料所製作的機器人在性能上無法和傳統機器人媲美,因此它們也只可能在某些特定環境中發揮重要作用。至少不必再為運輸結構材料而發愁。這和使用一種通用硬體材料就能創造出多樣化的設計是一個道理。而利用周邊常見材料來製作機器人則意味著你可以輕易地對你所組裝的任何東西進行修復和改造,儘管你需要重新教會它如何移動。
來自東京大學和人工智慧公司Preferred Networks的Azumi Maekawa,、Ayaka Kume、Hironori Yoshida、Jun Hatori、Jason Naradowsky和Shunta Saito等人參加了2018年神經訊息處理系統大會(NIPS)機器學習創意設計工作小組,並共同發表了論文,題目為「用常見材料即興設計機器人」。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!