
2015 年,德國費斯托公司(Festo)展示出一隻仿生機械蝴蝶,除了外觀神似真正的蝴蝶,它真正神奇的地方在於能搧動翅膀翩翩起舞,因為其機身中搭載著微型電池和電機裝置,讓它能完成蝴蝶輕盈的飛行動作。

但蝴蝶並不是科學家們唯一感興趣的仿生主題,自然界有很多昆蟲存在神奇的特質,例如螞蟻、蜘蛛、蜜蜂甚至蟑螂,都被科學家視作機器人的研究方向。哈佛大學甚至有一個專題 HAMR(Harvard Ambulatory MicroRobot)做出過一隻蟑螂仿生機器人,能夠探索地面並且運動。
不過最近,這隻蟑螂機器人擁有了一項新的技能,它從地面運動變成了水陸兩棲,學會了「水上漂」的技能,這種新的技能不但可以控制自身在水面上移動自如,還可以選擇主動下沉,在水下進行活動。
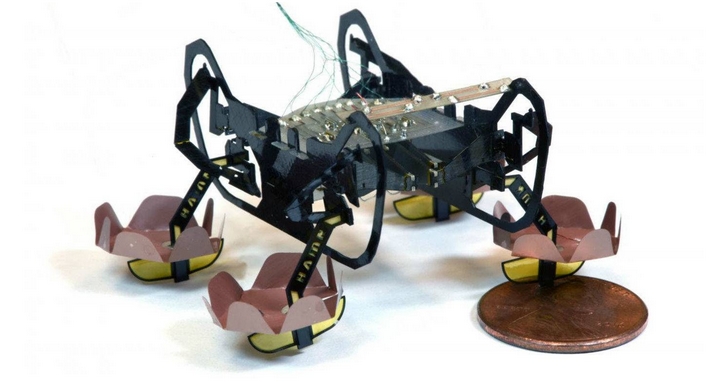
如影片所見,這台昆蟲機器人還處在實驗室階段,所以還沒有一個完美的外形。它的重量僅有 1.65g,設計與 2013 年的 HAMR 原型非常類似,但在四肢上增加了一個腳墊,藉由這個腳墊提供了足夠的浮力。這台機器人甚至可以再負重 1.44g 在水上飄浮移動,以最高 10 赫茲的頻率,在水面上進行快速擺動,還能追上預先放在水上的紙船。
按照官方介紹,要讓機器人能夠在水上行動,首先是讓機身保持輕盈。實際上,從 ARMR 的原型昆蟲蟑螂來看,這種昆蟲本身就具有在水中移動的能力,因此這一研究的最新進展似乎朝著仿生機器人蟑螂又更進一步,儘管讓人熟悉又厭惡,但這種昆蟲倒真的是 ARMR 不斷進化的「老師」呢!
但 ARMR 機器人這一次不光是要學習蟑螂的技巧,更希望能有所突破,從影片中我們能夠看到,它不但可以在水面活動,還可以主動下沉進入水中活動,透過四肢發出的電壓,打破水面的浮力,完成在水中行走的任務;又因為它的四肢都有塗上防水塗層,所以ARMR 仿生機器人並不會因為沉入水中而造成短路。
哈佛大學約翰·保爾森工程學院研究員,ARMR 機器人論文第一作者 Kevin Chen 表示,這一項目是為了證明,微型機器人同樣能夠利用自然界微小物體的運動規律,並以此來嘗試挑戰大型機器人的性能。
另一位作者 Neel Doshi 認為,目前 ARMR 能夠成功在水上運動的關鍵在於其大小,「如果它太大,那麼提供足夠的浮力會是一項挑戰,但如果它更小,就無法產生足夠下沉進入水中的力。」
自然界中,我們熟悉另一種水上昆蟲水黽(就是俗稱的水蜘蛛),同樣是在自身輕盈的基礎上,透過極快的移動速度以及借助水的表面張力,來達到在水面上行動而不會沉下去的效果;正因為這種非常特別的技巧,它們可以在水上生活和捕食,而模仿這種技巧做「水上漂」機器人的,ARMR 並不是第一個。
2015 年,漢城國立大學的仿生水黽機器人,就在試圖模仿水黽來製造能夠浮在水面的運動機器人,不過團隊的研究方向很特別,不是要在水上移動,而是要讓機器人從水面起跳。因為水黽這種昆蟲,在水面能夠瞬間跳起,施加自身數倍體重的力量卻不會沉入水中,這令科學家非常好奇。在研究之後他們發現,其中的秘訣在於水黽腿部運動的速度,當速度夠快時,水的表面需要足夠的時間產生變化,所以透過合適的速度加上適當的深度,使得水黽在水面上能夠迅速起跳。
這種速度+力度的精確控制,透過實驗得出結論並被運用在機器人上,由此,首爾大學的科學家造出了這個仿生水黽機器人,在跳躍時產生自身 16 倍重量卻依然可以騰空躍出水面,這不得不說是很像水黽的機器人了。
不論是哈佛大學的 ARMR,還是首爾大學的水黽仿生機器人,想要實現的共同目標都是讓機器人在水面運動。從無人機我們看到了機器人走向天空的可能,各種運輸機器人則代表了地面的力量,儘管水上機器人並非一朝一夕能夠出現在我們的日常生活中,但或許更多有趣的實驗,能幫助我們好好理解這個世界的運行,從而在某一天能夠真正造出民用的機器人。
消息参考 NEW ATLAS
本來授權轉載自極客公園

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!