
無論要讓機器人在平坦的地面,或者是凹凸不平的道路上自由移動,就現在科技而言並不是一件很困難的事情,但「垂直移動」總是讓科學家們大傷腦筋。麻省理工學院最近發表一部新影片,展示他們開發的 Cheetah 3 機器人研究成果;該機器人不但行動靈活,甚至還可以爬上樓梯,達成垂直移動的目的。
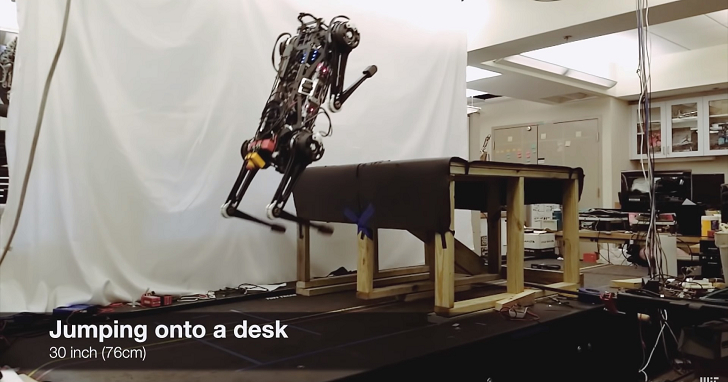
這隻約莫 40 公斤重,尺寸跟拉不拉多犬差不多大的 Cheetah 3 機器人,配備了麻省理工學院開發的最新演算法,使它可以在不仰賴任何攝影機、雷達的情況下,只透過「觸摸」周遭環境的方式,來躲避障礙物、爬上樓梯,甚至是跳到低矮的桌子上。

先前知名機器人公司 Boston Dynamics 也曾展示過旗下機器人 SpotMini 爬樓梯的動作,但那是透過光學影像辨識所達成;麻省理工學院 Cheetah 3 開發團隊卻有不一樣的想法,他們想知道是否可以讓機器人在「盲目」的狀態下,執行各種複雜動作。
麻省理工學院的機械工程學院教授 Sangbae Kim 認為,若是使用攝影機取得周遭環境資訊,影像辨識的精確度雖然很高,但卻會讓機器人在進行「爬樓梯」或「障礙閃避」等各種複雜動作時,因為運算速度的關係導致「躊躇不前」。
換句話說,Sangbae Kim 並不希望機器人過度仰賴影像辨識,因為這會拖慢機器人整體的活動靈敏度,若是能讓機器人透過「觸覺」的方式去感知周遭環境,反應速度會變得更快、更及時,有點像是人類的「反射動作」。
Cheetah 3 機器人被定位在多樣型任務的協助工具,例如核能發電廠內的關鍵檢查;正因為使用「觸覺」做為感知周遭環境的來源,Cheetah 3 可以靈活的自由穿梭於各種複雜地形,無論是樓梯或地面障礙物,讓人類用遠端遙控的方式,更加安全地完成危險、骯髒和困難的工作,而這正是機器人的使命所在。
上面的動態圖片只展示了一部分麻省理工學院的開發成果,有興趣的讀者可以參考下面的完整影片,看看 Cheetah 3 到底能夠做到哪些令人感到驚嘆的事。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!