
只要一到連續假期,高速公路或是各景點一定到處大塞車,雖然已經是2019年了,AI、自動駕駛車也開始上街跑還不能完全自動化,但已經比人類駕駛擁有更多的優勢。
一方面,半自動駕駛沒有一些常規限制:它們反應迅速,可以長距離協調操作,最重要的是,營運公司可以簡單地修改其煞車和加速模式以減少擁塞。
但是,半自動駕駛真的能夠減輕塞車的情況嗎?還是說當半自動汽車和人類駕駛汽車在同一條路上行駛的時候會加劇塞車情況?

一位柏克萊大學的研究生、特斯拉自動駕駛組的實習生Eugene Vinitsky透過調查發現,雖然目前只有一小部分車輛是半自動的,但現有研究表明即使很小的出現率(3-4%)也足以開始緩解擁塞。
也就是說,鑑於AV(Autonomous Vehicles:自動駕駛汽車)的獨特功能,我們希望確保其駕駛模式的設計能夠最大限度地滿足道路要求。AV的正確部署應儘量減少堵塞,降低總能耗,並最大限度地提高道路的通行能力。
但是最佳駕駛策略的研究關鍵問題是沒有形成共識。
對於自動駕駛汽車公司來說,沒有一個簡單的指標可以讓他們評估並實施其駕駛策略。
換句話說,當前半自動駕駛的部署沒有基準,即可以用來比較不同研究組和方法進展的標準化問題。
如果能有設計合理的基準,就可以檢查AV的駕駛行為並快速為其評分,確保在道路上行駛的都是最佳設計的AV。此外,基準應該促進研究,使研究人員能夠輕鬆快速地嘗試新技術和演算法,瞭解這些技術和演算法是如何解決擁塞問題的。
混合自動駕駛的11個新基準填補研究空白
為了填補這一空白,Eugene Vinitsky在CORL上發表的論文提出了集中式混合自動駕駛交通控制中的11個新基準。所謂的集中式混合自動駕駛交通控制是指車輛和交通號誌由一台電腦控制的交通控制。
以下的研究內容是以Eugene Vinitsky第一人稱撰寫的內容:
這些基準會作為Flow工具項目的一部分,這個項目用於在交通模擬器SUMO和AIMSUN中將控制和強化學習(使用RLlib 和rllab作為強化學習庫)應用於自動駕駛車輛和交通號誌。這些基準中獲得高分意味著實際擁塞指標的改進,例如平均行駛速度,道路系統總延遲和道路吞吐量。透過在這些基準上取得的進展,希望可以回答有關AV應用的基本問題,並給出現實世界中部署可改善擁塞的AV的路線圖。
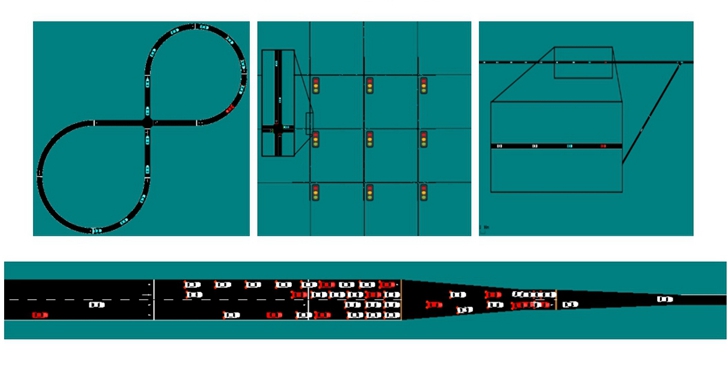
本文前面描述的基準場景包括以下設置:
- 一個簡單的8字形,代表一個小型交叉路口,其最佳方案是蛇形行駛或學會選擇向沒有衝突的方向移動。
- 可調整大小的紅綠燈網格,其目標是最佳化燈光模式,以最大限度地縮短平均轉換時間。
- 許多車輛從匝道進入高速路主道上引起行車緩慢,導致道路平均行駛速度下降。
以下Gif展示了在這些基準中發現的緊急行為案例,很有趣也很有意義,圖中顯示了瓶頸的一部分,其中四車道合併為兩車道,後續的二車道合併一車道並未示出。
上半部顯示的人類駕駛的情形。人類所駕駛汽車隨意地由四車道駛入兩車道,由於車道合併導致瓶頸繼而發展成為擁塞,降低了整個道路系統的速度。在下方的Gif圖中,在人類駕駛車輛(橙色)中混入了自動駕駛車輛(紅色)。我們發現自動駕駛車輛透過學習控制其進入合併車道的速度,進而有助於後面的車輛順利切入合併車道。儘管只有十分之一的車輛是自動駕駛的,但道路系統能夠保持不擁擠,並且車流量提高了35%。
一旦我們制定好了基準,我們就要確保研究人員有一組基準值來檢查他們的演算法。我們執行了一個小規模的超參數掃描,然後將找到最佳超參數提供以下RL演算法運使用:增強隨機搜尋,近端策略最佳化,進化策略和信任區域策略最佳化。
下面圖表的第一行表示在訓練時間內使用一組指標獎勵的基準分數。每個圖對應於一個場景,顯示其演算法獲得分數與訓練時間的函數關係。如果演算法分數偏離這些數值,就可以立即知道演算法是否正確。
然而,從對擁塞的影響這一角度來看,真正重要的是最後的圖表,即我們根據真正影響擁塞的指標對演算法進行的評分。這些指標包括:8字形和合併車道的平均行駛速度,交通網中每輛車的平均延遲,以及瓶頸路段每小時車輛的總流出量。中間四列是演算法根據這些基準指標的評分,最後一列是完全人類駕駛的得分。請注意,所有這些基準的AV出現率都相對較低,從最低的7%到最高的25%(即每14輛車中1 輛AV到每4輛車1輛 AV)。完全人類駕駛一欄中的擁塞指標都嚴重惡化,這表明即使出現率非常低,AV也可以對擁塞產生驚人的影響。
那麼AV究竟是如何緩解擁塞的呢?下面的動圖展示了一種可能的機制,它比較了在主幹道匝道入口完全人類駕駛的情形(上半部)和每十輛車中有一輛是自動駕駛(紅色)而其它九輛是人類駕駛(白色)的情形。在這兩種情形下,人類駕駛員都想盡快衝入主道,而幾乎不關心主道上的車輛。
在完全人類駕駛的情況下,車輛緊密地跟隨,當匝道上的車衝入主道時,後面的車輛需要急踩剎車,導致「車輛聚集」。然而,在存在AV的情況下,自動駕駛車輛在接近匝道入口時加速進而拉開了與後面車輛之間的距離。較大的距離會形成緩衝區,因此當匝道上車輛進入主道時,主道上的車只需輕踩剎車就可避讓開。
雖然我們無法用數學方法證明,但我們相當確定我們的結果都沒有達到最佳分數。而我們的論文給出了一些論據,表明我們只是找到了局部最小值。
當前的挑戰:任重而道遠
目前還有一大堆完全沒有解決的問題。首先,這些基準只是用於完全集中式的情況,即所有汽車都由一台中央電腦控制。任何真正的道路駕駛策略演算法都可能必須是分佈式的:我們能否在不降低效果的情況下使用分佈式?此外,還有一些公平原則沒有討論。
如下面的視頻所示,通過完全攔住某車道可以顯著改善瓶頸路段的車輛流出;雖然這種道路駕駛策略是有效的,但是它在獎勵了其他駕駛員的同時嚴重懲罰被攔截車道上的駕駛員,這不可避免會導致狂暴情緒。
![]()
最後,還有一個頗具吸引力的泛化問題。對於每個獨特的駕駛場景,似乎很難部署一個統一的駕駛策略; 是否有可能找到一個適用於不同類型交通網絡的單一控制策略?我們的目標是在未來的一系列基準中解決所有這些問題。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!